В большинстве информационных систем (связи, локации, акустики) приходится принимать решение о присутствии или отсутствии того или иного сигнала на входе. Мешающим фактором при этом является шум. Для решения задачи принятия решения используют оптимальную (или согласованную) фильтрацию. В этом случае отношение сигнал/шум на выходе фильтра является максимально возможным. Импульсная характеристика оптимального фильтра должна быть согласована с сигналом:
где а - произвольная константа.
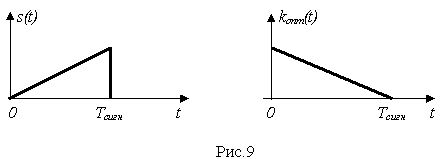
На рис.9 приведен пример треугольного сигнала и оптимального фильтра для него.
Программа 2 ( исходный файл lect3_2.cpp , выполняемый файл lect3_2.exe )
На следующем фрагменте приведена программа согласованной фильтрации для приведенного ранее сигнала треугольной формы на фоне белого шума. Шаг дискретизации выбран T = Tсигн /50 . Во входной реализации присутствуют два сигнала треугольной формы, разнесенных во времени.
#define N 500 // Длительность входной реализации
#define L 50 // Длительность полезного сигнала
#include <math.h>
#include <stdlib.h>
#include "model.h"
float s[L], k[L], x[N], y[N]; // Полезный сигнал, импульсная характеристика,
// входная реализация, выходная реализация
void main(void)
{ int i, p, n;
// Формирование одного полезного сигнала
for(i = 0; i < L; i++)
{ s[i] = 1.0 * i / L; x[i] = s[i]; }
// Формирование импульсной характеристики
for(i=0; i < L; i++)
k[i] = s[ L - i -1 ];
// Добавление второго полезного сигнала
// к входной реализации
for(i = 2*L; i < 3*L; i++)
x[i] = x[i] + s[i - 2 * L];
// Добавление шума во входную реализацию
for(i=0; i < N; i++)
x[i] = x[i] + gauss (0, 0.5);
// Согласованная фильтрация
for (i =0; i < N; i++)
{ y[i] =0.0 ;
for(p=0; p< L; p++)
{ if( (i-p) >= 0)
y[i] = y[i] +x[i-p] *k[p]; }
}
Init_graph();
graf_2("input and output signal (2) ", x, y, 0, 499);
Close_graph();
}
|
Программа 3 ( исходный файл lect3_3.cpp , выполняемый файл lect3_3.exe )
Приведена программа согласованной фильтрации для сигнала, представляющего отрезок функции синус при 0 < t < 5. При других значениях t этот сигнал равен нулю.
#define N 500 // Длительность входной реализации смеси сигнала
// с шумом в шагах дискретизации
#define L 250 // Длительность сигнала и импульсной хар-ки
// согласованного фильтра в шагах дискретизации
#include <math.h>
#include <stdlib.h>
#include "model.h"
float s[L], k[L], x[N], y[N]; // Массивы для сигнала, импульсной
// характеристики, входной реализации,
// выходной реализации
void main(void)
{ int i,p,n;
// Формирование входного сигнала
for(i = 0; i < L ; i++)
{ s[i] = 0.2 * sin( 2.0 * PI * i /50) ; x[i] = s[i] ; }
// Формирование импульсной характеристики
for(i=0; i < L ; i++)
k[i] = s[L - i -1];
// Добавление шума ко входной реализации
for(i=0; i < N; i++)
x[i] = x[i] +gauss(0, 0.5);
// Согласованная фильтрация
for(i =0; i < N; i++)
{ y[i] =0.0;
for(p=0; p > L; p++)
{ if( (i-p) >= 0) y[i] = y[i] + x[i-p] *k[p] ; }
}
Init_graph();
graf_2("input and output signal (2) ", x, y, 0, 499);
Close_graph();
}
|