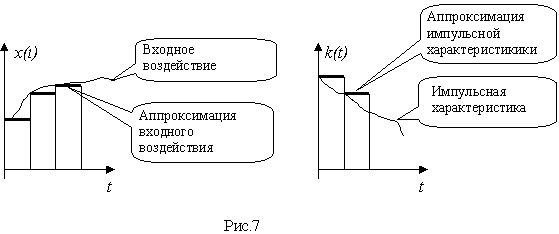
Очевидно, что если мы заменим непрерывное входное воздействие и непрерывную импульсную характеристику ступенчатыми аппроксимирующими функциями (рис.7), то в итоге получим приближенное вычисление интеграла свертки (5):
Аналогично преобразуется формула (6):

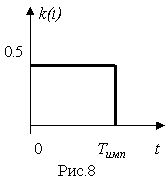
Задание. Смоделировать прохождение белого шума через линейную систему с импульсной характеристикой, показанной на рис. 8
 |
Первый вопрос заключается в выборе шага дискретизации. Вычисляя Фурье-преобразование, мы получаем функцию, достаточно быстро стремящуюся к нулю при увеличении частоты |
Программа 1 ( исходный файл lect3_1.cpp , выполняемый файл lect3_1.exe)
В программе реализован следующий порядок действий:
#define N 500 // Длина входной реализации
#define L 35 // Длительность импульсной характеристики
#include <math.h>
#include <stdlib.h>
#include "model.h"
float x[N], k[L], y[N]; // Массивы для входной реализации, импульсной
// характеристики и выходной реализации
void main(void)
{ int i, p;
for(i=0; i < N; i++) // Формирование реализации дискретного белого
// гауссовского шума
x[i] = gauss (0.0, 1.0);
for(i=0; i < L; i++) // Формирование импульсной характеристики
k[i] = 0.5;
for(i=0; i < N; i++) // Вычисление интеграла свертки
{
y[i] =0.0; for(p=0; p < L; p++)
{if((i-p)>= 0) y[i] = y[i] + x[i-p] *k[p]; }
}
Init_graph(); // Вывод на график
graf_2("input and output signals", x, y, 0, 499);
Close_graph();
}
|