
Существует несколько способов исследования систем. Классические способы связаны с численными методами решения дифференциальных уравнений. Как известно, в общем случае любая линейная система представляется дифференциальным уравнением
В зависимости от коэффициентов уравнения, описывающего систему, возможны различные ситуации. Если ai(t) и bi(t) не зависят от времени, то уравнение (и соответственно сама система) называется стационарным. В противном случае параметры системы зависят от времени, т.е. система нестационарная. Уравнение называется стохастическим, если случайными являются или входное воздействие, или параметры системы. Все численные методы решения дифференциальных уравнений используют пошаговое интегрирование. Эти методы широко представлены в литературе. Рассмотрим практически удобный прием построения модели, а именно, модели в виде интеграла свертки. Как мы знаем (об этом говорилось ранее), основной характеристикой линейных систем является импульсная характеристика k(t), которая представляет реакцию системы на дельта-импульс ![]() :
:
![]() , при t=0,
, при t=0,
![]() , при других t.
, при других t.
Интеграл от дельта-функции равен 1, т.е.  , где а - любое число, большее нуля. В этом случае выходная реакция системы y(t) и входной сигнал x(t) связаны интегралом свертки:
, где а - любое число, большее нуля. В этом случае выходная реакция системы y(t) и входной сигнал x(t) связаны интегралом свертки:

Как правило, входное воздействие рассматривается, начиная с ![]() . В этом случае интеграл свертки можно записать в виде (отбросив интервал, где входная функция равна нулю)
. В этом случае интеграл свертки можно записать в виде (отбросив интервал, где входная функция равна нулю)
 |
(5) |
На рис.5 продемонстрирован эффект интеграла свертки.
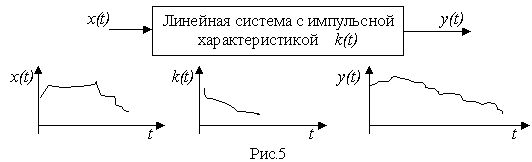
Отметим важный момент - для физических реализуемых систем импульсная характеристика равна нулю при t < 0. Это свидетельствует о том, что выходная реакция на входное воздействие не может наступить раньше входного воздействия.
Пример 3. Сигнал на входе линейной системы записывается следующим образом:
| s(t) = 4exp(-4t), | при |
| s(t) = 0 | при t < 0. |
Линейная система описывается импульсной характеристикой k(t) = exp(-2t) при ![]() . Вычислим сигнал на выходе системы, используя соотношение (5):
. Вычислим сигнал на выходе системы, используя соотношение (5):

Пример 4. Сигнал на входе линейной системы записывается следующим образом:
| s(t) = 5,, | при 0< t <10, |
| s(t) = 0, | при других значениях t. |
Импульсная характеристика системы равна k(t). Записать сигнал на выходе системы. Вычислим сигнал на выходе системы по формуле (5):

Интересное упрощение возможно, когда длительность импульсной характеристики значительно короче длительности входного воздействия (рис.6).
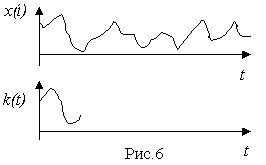 |
В этом случае меняем нижний предел интегрирования: |